





I. Présentation du matériel nécessaire▲
|
|
|
|
|
|
|
Tous les fichiers du projet sur GitHub : https://github.com/uktechreviews/MagPi/tree/master/timelapse
II. Étape 1 : connecter le kit support pan/tilt▲
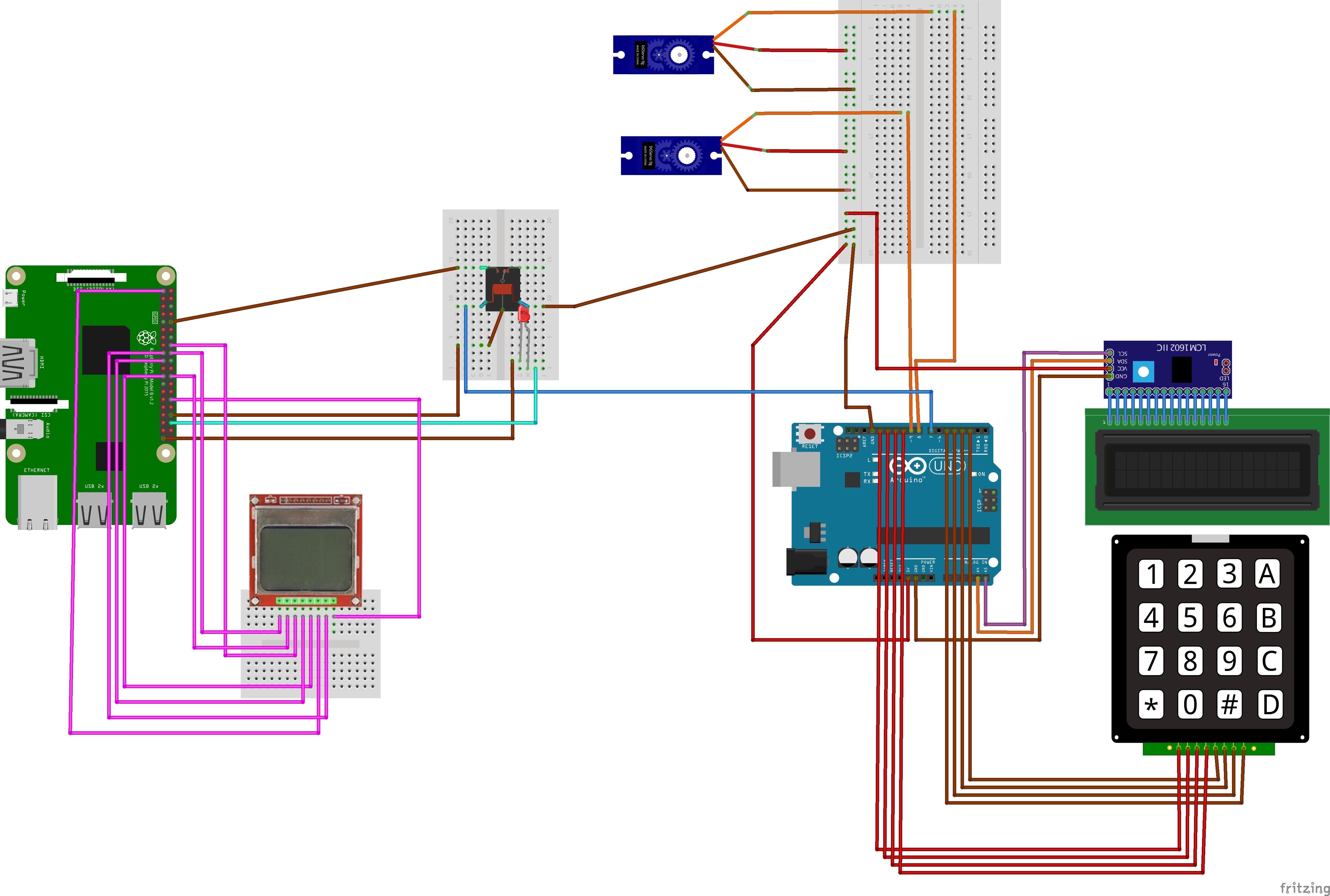
On commence ce projet en connectant le kit support pan/tilt d'Adafruit à la carte Arduino. Réalisez une ligne d'alimentation 5 V et une autre ligne pour la référence 0 V sur une plaque de câblage rapide. Connectez les fils rouges d'alimentation de chaque servomoteur à la ligne d'alimentation 5 V de la plaque de câblage. Les fils marron seront quant à eux connectés à la ligne de référence 0 V. Reliez ensuite le fil orange du signal de commande du servomoteur de l'axe pan au connecteur 9 de l'Arduino, celui de l'axe tilt sera quant à lui relié au connecteur 8.
III. Étape 2 : connecter l'afficheur I2C▲
Une fois les servomoteurs connectés, nous pouvons ajouter l'afficheur LCD I2C à l'Arduino. Pour cela, nous avons besoin de quatre fils de câblage. Connectez la broche GND de l'afficheur à un connecteur GND de l'Arduino, puis connectez la broche VCC à la ligne d'alimentation 5 V créée précédemment pour les servomoteurs. Connectez la broche SDA au connecteur analogique A4 de l'Arduino, et la broche SCL au connecteur analogique A5. Nous devons télécharger les bibliothèques d'utilisation de l'afficheur LCD I2C pour l'Arduino. La dernière version est disponible dans le playground Arduino : LCDi2c library.
IV. Étape 3 : connecter le clavier▲
Connecter le clavier peut être l'une des parties les plus délicates de la réalisation. Vous trouverez une bonne documentation pour la configuration et l'utilisation du clavier dans le playground Arduino : Keypad library for Arduino. Nous devrons télécharger et installer ces bibliothèques depuis cette page. Nous avons connecté les lignes aux connecteurs numériques 5, 4, 3 et 2, puis les colonnes aux connecteurs 13, 12, 11 et 10. Si vous constatez un affichage incorrect des caractères lorsque vous appuyez sur les touches, vous devrez essayer d'inverser l'ordre des lignes et des colonnes dans les connexions. Par un jeu d'essais-erreurs, vous devriez pouvoir régler le problème facilement.
V. Étape 4 : assembler le module caméra▲
Fixez le module caméra sur le support pan/tilt. Nous avons constaté qu'un câble de connexion de la caméra plus long était recommandé pour éviter à la caméra d'être gênée et bloquée dans son mouvement. Connectez l'autre extrémité du connecteur de la caméra au Raspberry Pi, le côté imprimé du circuit du câble ruban doit être dirigé vers les ports USB.
VI. Étape 5 : connecter l'écran Nokia 5510 (optionnel)▲
Cet afficheur LCD optionnel permet de voir le nombre d'images capturées. Il existe deux versions de cet afficheur, donc nous vous conseillons de vérifier la configuration des broches et de faire les ajustements nécessaires. Une excellente documentation et des liens vers les bibliothèques Python sont disponibles dans ce guide en PDF : Nokia 5110/3310 LCD Python Library.
- La broche VCC de l'afficheur est connectée au 3,3 V.
- La broche GND de l'afficheur est connectée à la masse.
- La broche D/C de l'afficheur est connectée à la broche GPIO 23.
- La broche RST de l'afficheur est connectée à la broche GPIO 24.
- La broche CS de l'afficheur est connectée à la broche SPI CE0.
- La broche CLK de l'afficheur est connectée à la broche SPI SCLK.
- La broche DIN de l'afficheur est connectée à la broche SPI MOSI.
Il y a une broche optionnelle Backlight dédiée au rétroéclairage que vous pouvez retirer de l'alimentation 5 V du Rapsberry Pi ou de l'Arduino. Si vous l'alimentez depuis l'Arduino, vous devez aussi connecter la broche GND de l'afficheur LCD à un connecteur GND de l'Arduino.
VII. Étape 6 : ajouter un relais et une LED▲
Nous sommes maintenant rendus au moment où il faut relier ensemble le Raspberry Pi et l'Arduino. L'Arduino commande la rotation des servomoteurs, déplace la caméra et indique au Raspberry Pi quand prendre une photo. Pour nous assurer que la caméra ne se déplace plus à ce moment-là, nous avons inclus un décompte de trois secondes et une pause dans le code Arduino avant chaque prise de vue. Le Raspberry Pi se contente d'attendre que sa broche GPIO 15 soit commutée à la masse grâce à un contact. Ce contact est obtenu avec un mini relais 5 V commandé par le connecteur numérique 7 de l'Arduino. En fonction du relais que vous avez commandé, vous devrez d'abord relier la bobine du relais entre les connecteurs 7 et GND de l'Arduino. Les contacts du relais seront reliés entre les broches GPIO 15 et GND du Raspberry Pi. Vous devriez normalement entendre un déclic à chaque fois qu'une photo est prise, dû à la fermeture du contact du relais puis sa réouverture peu après. La dernière étape consiste à ajouter une LED qui s'allumera pour confirmer qu'une photo a bien été prise. Connectez la patte la plus longue de la LED (la borne positive) à une résistance de 270 ?, puis à la broche GPIO 16. La patte la plus courte sera reliée à la masse.
VIII. Notes de la Rédaction de Developpez.com▲
Cet article est une traduction extraite du n° 49 du magazine The MagPi : Programmable Motion Time-Lapse Camera rig.
Nous remercions les membres de la Rédaction de Developpez pour le travail de traduction et de relecture qu'ils ont effectué, en particulier : f-leb, jlliagre et Malick SECK.
